 Block Programs¶
Block Programs¶
In this section the user can configure and develop the different programs for aircraft control, guidance, navigation, etc.
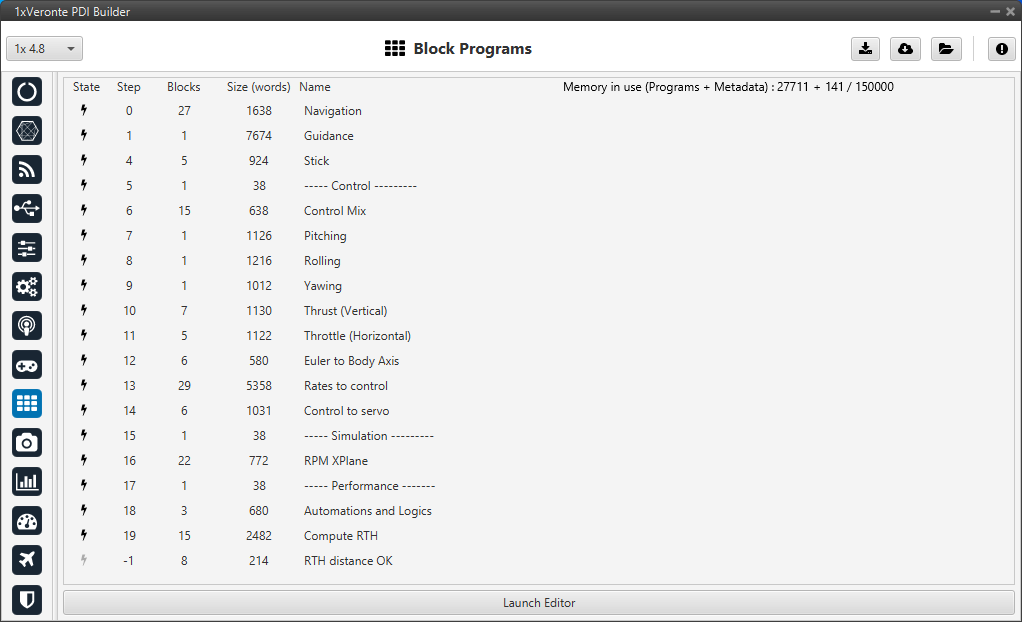
Block Programs menu¶
The following programs have been developed for the configuration of the Embention VTOl aircraft:
Note
The program name is defined by the user, so they do not have to match these.
Navigation: Control laws that allow navigation through the use of both internal and external sensors.
Guidance: Control laws that allow obtaining a precise guidance to perform the desired mission.
Stick: Block program to transform pilot stick actions into input values to Autopilot 1x.
Control Mix: Block program that establishes the optimal flight configuration as a function of the IAS value.
Pitching: Control laws for performing perform Pitch in both multicopter and fixed-wing (FW) flight configurations.
Rolling: Control laws for performing Roll in both multicopter and fixed-wing (FW) flight configurations.
Yawing: Control laws for performing Yaw in both multicopter and fixed-wing (FW) flight configurations.
Thrust (Vertical): Control laws for performing Thrust in multicopter flight configurations.
Throttle (Horizontal): Control laws for performing Thrust in fixed-wing (FW) flight configurations.
Euler to Body Axis: Program that transforms a reference system from Euler Axis to Body Axis.
Rates to control: Control laws that transform the desired guidance variables into output controls.
Control to servo: Control laws that transform output controls into servo actions.
RPM XPlane: Program that allows to transform the aircraft real performance in a simulated environment.
Compute RTH: Program to allow the aircraft to choose from several points which is the best one to be used as RTH point for the RTH phase.
RTH distance OK: Program to check if a particular point is suitable to start the RTH phase.
For more information, visit the Block Programs section of the 1x PDI Builder user manual.